 |
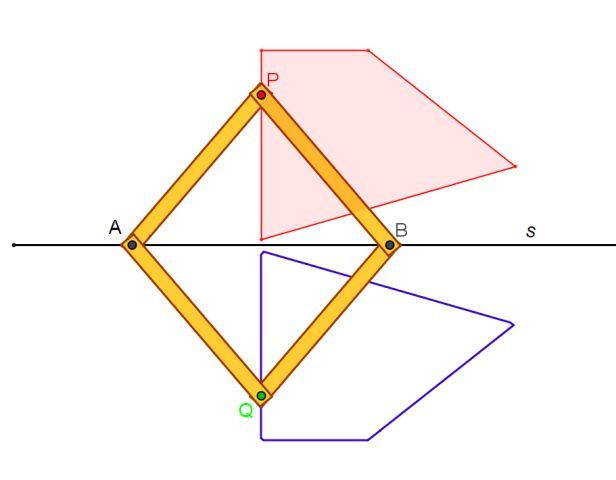 |
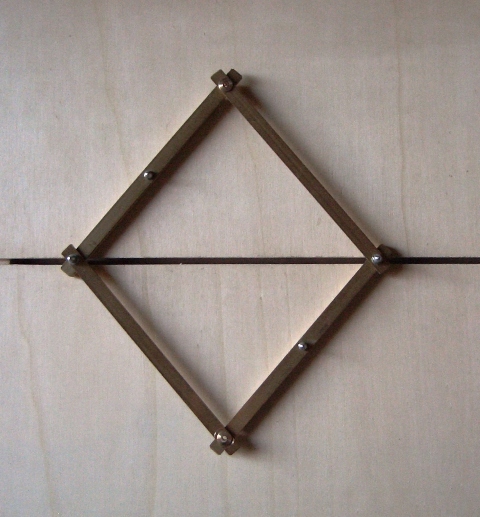
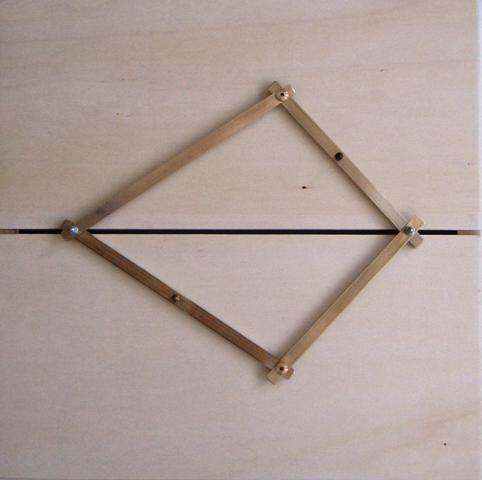
Un rombo articolato ha due vertici opposti vincolati a cursori che scorrono entro una scanalatura rettilinea s. Il biellismo ha due gradi di libertà: i vertici liberi del rombo (P e Q) descrivono perciò due regioni piane (limitate) che si trovano in semipiani opposti aventi s come origine comune. La posizione di P determina univocamente quella di Q (e viceversa). Dalla semplice geometria del sistema meccanico si ricava subito che:
- la retta PQ è perpendicolare ad s;
- i punti P e Q sono equidistanti da s.
Perciò P e Q si corrispondono nella simmetria assiale ortogonale di asse s.
Se (per es.) P è vincolato a una traiettoria assegnata, Q descrive la traiettoria simmetrica rispetto ad s
Esplorazione della macchina e zona accessibile al puntatore
 |
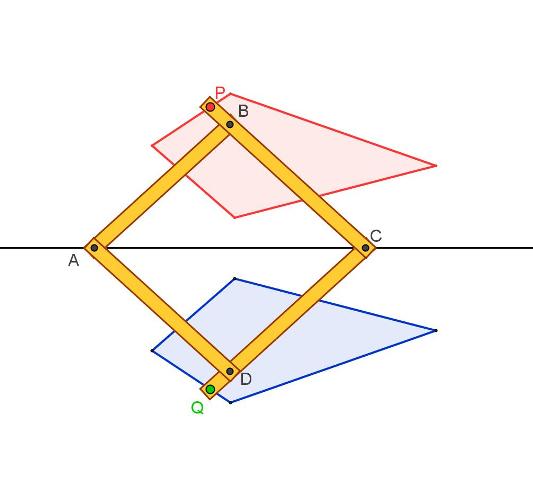 |
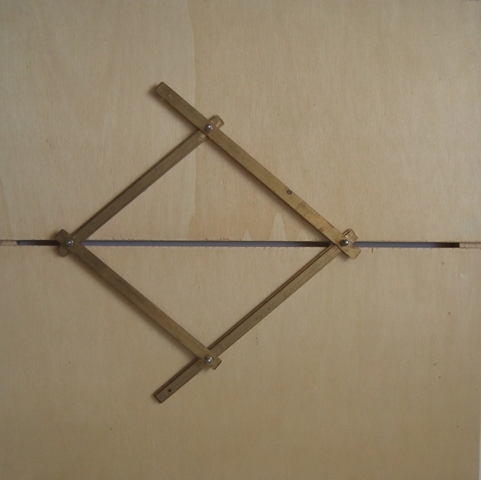
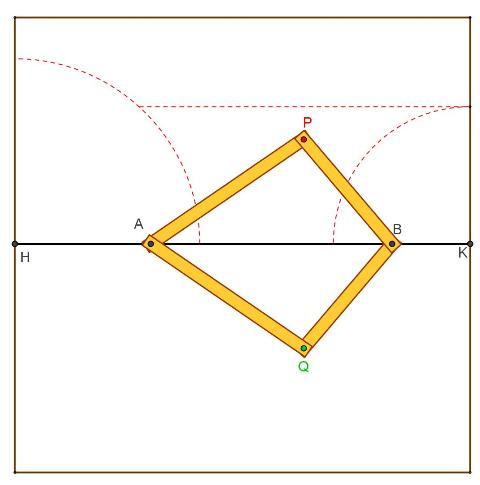
Un rombo articolato ABCD ha due vertici opposti vincolati a cursori che scorrono entro una scanalatura rettilinea s. I punti P e Q sono scelti sul prolungamento dei lati CB e CD in modo tale che BP=DQ. Il biellismo ha due gradi di libertà: i punti P e Q descrivono perciò due regioni piane (limitate) che si trovano in semipiani opposti aventi s come origine comune. La posizione di P determina univocamente quella di Q (e viceversa).
Dalla semplice geometria del sistema meccanico si ricava subito che:
- la retta PQ è perpendicolare ad s;
- i punti P e Q sono equidistanti da s.
Perciò P e Q si corrispondono nella simmetria assiale ortogonale di asse s.
Se (per es.) P è vincolato a una traiettoria assegnata, Q descrive la traiettoria simmetrica rispetto ad s.
 |
 |
Il deltoide articolato (PB=QB e PA=QA, PB ≠ PA) ha due vertici A e B che scorrono lungo una scanalatura rettilinea s. Il biellismo ha due gradi di libertà: i vertici liberi del rombo (P e Q) descrivono perciò due regioni piane (limitate) che si trovano in semipiani opposti aventi s come origine comune. La posizione di P determina univocamente quella di Q (e viceversa). Dalla semplice geometria del sistema meccanico si ricava subito che:
- la retta PQ è perpendicolare ad s;
- i punti P e Q sono equidistanti da s.
Perciò P e Q si corrispondono nella simmetria assiale ortogonale di asse s.
 |
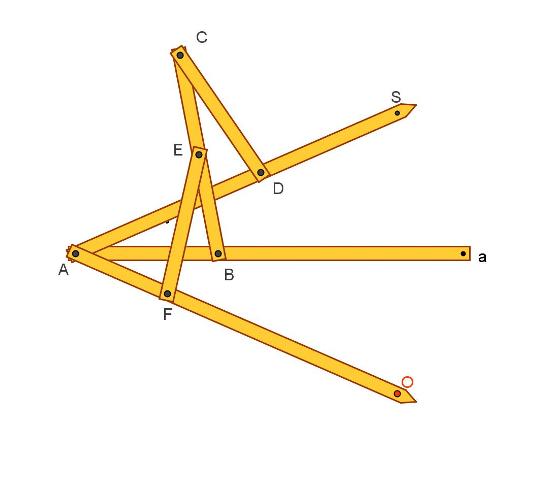 |
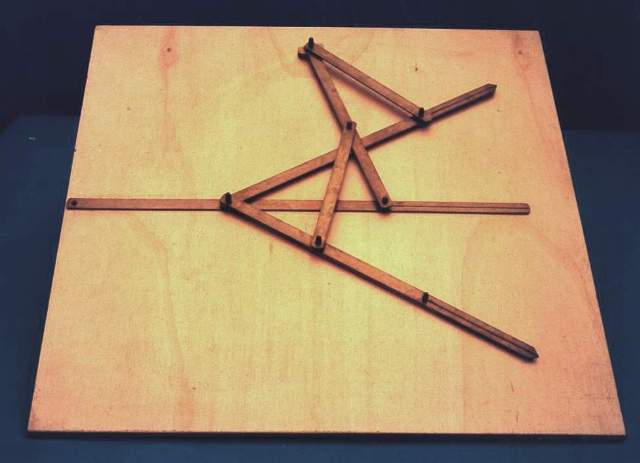
Gli antiparallelogrammi articolati ABCD e ABEF sono simili (hanno i lati in proporzione e l'angolo ABC in comune). L'asta a su cui è posto il lato AB è fissata al piano. Poichè durante la deformazione gli antiparallelogrammi restano sempre simili, le aste r ed s su cui sono fissati rispettivamente i lati AD e AF sono, in ogni posizione, simmetriche rispetto ad a.
 |
 |
"Due rombi articolati OAPB e OCQD hanno il vertice comune O imperniato al piano del modello; due ribaltatori del Kempe applicati l'uno ai lati OA e OC e l'altro ai lati OB e OD dei due rombi, li mantengono , in ogni posizione, simmetrici rispetto ad un'asta rigida s imperniata nel punto O e girevole attorno ad esso. I punti P e Q si corrispondono nella simmetria di asse s, qualunque sia la direzione di s sul piano del modello.
")
")